If you’ve read Harmful Algal Blooms, Part 4, you know that I had developed a plan to obtain the spectral signature of the Alexandrium monilatum, a toxic dinoflagellate that causes harmful algal blooms in the Chesapeake Bay watershed, from the hyperspectral data that was collected August 17, 2013. I wanted to use spectral signatures to map the extent of harmful algal blooms in the James and York Rivers. However, lots of data doesn’t always mean good data.
The hyperspectral data was collected using a sensor that was mounted on a NASA airplane. The angular cone of visibility detected by a sensor at a given time is called the Instantaneous Field of View (IFOV). The size of the IFOV determines the resolution or minimum size of a pixel.
In this image from Natural Resources Canada, area A is the IFOV and area B is the area on Earth’s surface that that can be seen at a given time (B=A*C).

Area B, the area that can be sensed at any time, depends on many factors, including the altitude of the plane and the angle of the sensor. This illustration from Natural Resources Canada illustrates the effect of angle of view.
During the August 17 data collection flight, the part of the sensors internal navigation system that measures the plane’s attitude or angle failed. This meant that we could not determine pixel size. It also meant that location data was not available for the hyperspectral data.
GIS stands for Geographic Information Systems. The term “geographic” refers to location. Without geographic coordinates, we could not accurately place our data on a map. What could we do?
Normally, one would georectify the data using by lining up ground control points. Ground control points are known locations on the ground. they must be small, unchanging and easy to recognize. But, how do you find ground control points in a picture of water?

Fortunately, we had a .kml file of the flight path, which listed geographic coordinates and times, and a few images with features other than water like this image with a large Navy dock.
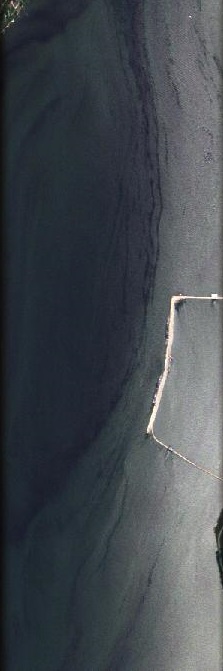
We were able to use measurements of the dock to calculate pixel size. We calculated the pixels to be about 2 meters long (a long track) and 3 meters wide (across track).
Dr. Kenton Ross, the national science adviser for NASA DEVELOP, was also able to use time signatures from the flight path file to determine where the plane was at a given time. He matched these times to the time variable of the hyperspectral images and was able to estimate approximate geographic coordinates for each of the images. The seven hyperspectral image sites for the York River are shown below.

However, I still had to give up a big part of my project design. When planning the project, I had forgotten one very important fact: water flows. Unlike ground control points, water does not stay in place over time.
On the image above, you can see a black squiggle. This is the path of the data flow cruise. It overlaps two of the hyperspectral images shown above in space. However, since the chlorophyll samples were not collected at the exact same time (although it was within a few hours) as the hyperspectral images, the two data sets do not overlap in time. Because there is a time difference, the water moved. This might not make a big difference at 30 meter resolution, but at 2 to 3 meters, it could be a big deal.
There was another problem. The shape file with the locations lost its headers during processing. The ASCII file had to be edited in order to move the locations into ENVI.
Stay tuned for the final post of this series, Harmful Algal Blooms, Part 6, to learn how I (hopefully) resolve these issues and finish my project.

2 thoughts on “Harmful Algal Blooms – Part 5: Trouble in Data Land”